三張貼紙讓特斯拉“跑偏”——
全自動駕駛夢何日實現
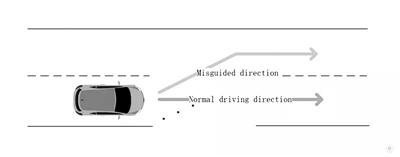
三個圓點代表三張貼紙,有可能引導特斯拉駛入左側的反向車道。 圖片來自網絡
今日視點
本報記者 李宏策
現實版“鋼鐵俠”馬斯克曾在2016年寫道:“你將能夠從幾乎任何地方召喚你的特斯拉。一旦它載上你,你就可以在前往目的地的過程中睡覺、閱讀或做任何其他事情。”
3年過去了,理想總是很美好,現實也總是很骨感,馬斯克的全自動駕駛夢更近了嗎?
可惜,夢想總被冷水潑。近日,騰訊科恩實驗室發布最新研究報告,對準特斯拉自動駕駛系統“三炮齊射”,宣稱特斯拉Model S的雨刷識別系統、車道判斷系統和車輛控制系統存在漏洞,再次將自動駕駛的安全問題置于聚光燈下。
科恩實驗室提出的三項漏洞中,雨刷錯誤啟動所幸還無大礙;利用系統漏洞實現游戲手柄遙控,把特斯拉變成大號玩具車是駭客們玩出的新花樣;最抓人眼球的要數道路識別系統漏洞,在路面貼上難以注意到的三個小貼紙,假扮行駛路線,成功“忽悠”經過的特斯拉錯誤判斷并駛入反向車道。逆向走位,畫面激烈猶如電影大片,后果讓人不敢想象。
三張紙條真能“封印”特斯拉?
科恩實驗室研究認為,特斯拉AutoPilot的道路識別系統性能強大,在測試過程中使用了很多不規則道路,讓測試車輛系統能夠有效識別復雜的道路標識。然而,Autopilot識別不完美道路標志的能力使其對某些錯誤信息更為敏感,導致不顯眼的貼紙成功“得手”。
科恩發布報告后,特斯拉隨即給出回應:“駕駛員可以隨時通過使用方向盤或剎車輕松覆蓋自動駕駛,駕駛員也應該隨時準備應對突發情況,現實世界不存在這一擔憂。”
貼紙的風波剛起,特斯拉又信心滿滿地宣布更新美國用戶系統,增添最新版本“無縫導航”功能,可實現在默認許可下車輛自動改變車道。此前,特斯拉自動駕駛系統在進行操作前會主動要求司機手動確認執行車道變化。新的軟件更新改變了這一點,駕駛員設定目的地后,可選擇在無需轉彎桿確認情況下汽車自動改變車道。系統在執行自動變道前,將通過鈴聲、視覺信號等方式通知司機,為駕駛員觀察環境及取消變道操作留有時間。當然,特斯拉也補充道,駕駛員仍必須始終對汽車負責,并且必須始終控制汽車。
特斯拉通告中寫道,自2018年推出AutoPilot功能以來,全球用戶已經使用該功能行駛超過1億公里,并根據系統建議執行超過900萬次車道變更。客戶反饋該功能讓公路旅行和高速駕駛更加輕松、愉快。有美國媒體認為,三張貼紙似乎并未對其造成嚴重影響,特斯拉此次更新是向全自動駕駛方向再邁進一步。
其實,科恩實驗室的東家騰訊早在2017年就已成為特斯拉的第五大股東,科恩發布“黑材料”、特斯拉針鋒相對“正面剛”也遠不是第一次,科恩和特斯拉的“相愛相殺”都是為了自動駕駛能夠走得更遠。
全自動駕駛離我們還有多遠
按照馬斯克的說法,特斯拉將在2019年年底實現完全自動駕駛。類似的話馬斯克在2016年也說過,不過那會兒說是2018年就能實現。到底什么時候才能做到上車、睡覺、到家?
對此,西蒙顧和上海辦公室執行總監陸盛赟在接受科技日報記者采訪時給出詳細解讀。目前,各大車企最新量產汽車主要在L2級(部分自動化)上下功夫,也有車型已經率先進入L3(有條件自動化)階段,如最新配置自動駕駛功能的奧迪A8、特斯拉等。
陸盛赟表示,那種駕駛員可以睡覺、完全脫手的全自動駕駛在現有技術上還無法實現。目前的主流研發方向是一種“人技結合”的自動駕駛,司機仍需要在行駛中發揮作用,自動駕駛不等于無人駕駛。而馬斯克所說于今年年底實現的全自動駕駛,可能需要附加很多特定條件,如制定與之相適應的交通和監管規則;在一定封閉的環境內,車輛均采用相同的自動駕駛系統等,其商業落地場景具有局限性。
“此前,百度等已經在封閉園區內實現了這種有附加條件的全自動駕駛,但離全社會的完全自動駕駛還是很遙遠的。”
開車睡到家,技術和社會都得加把勁
法國自動駕駛技術專家李鈾對科技日報記者表示,目前的自動駕駛系統主要包含感知、定位、高精地圖、導航與控制五大塊。其中,感知模塊通過處理攝像頭、毫米波雷達、激光雷達、超聲波雷達等各種傳感器的數據,來獲取障礙物、行道線、路面等信息,再結合定位、地圖生成駕駛路徑,最后再由控制器執行。由此可以看出,感知系統在自動駕駛系統中占據重要位置,也是主要難點。
李鈾說:“機器學習被視為實現自動駕駛的重要核心技術,其通過在已標記的數據集上進行統計學習,來模擬人的認知能力。”
目前機器學習集中應用在感知系統當中,包括圖像識別、點云識別等。最近幾年的深度學習因為深層神經網絡能夠處理海量數據,在各大數據集上達到甚至超越人類的認知能力,使得該技術快速產業化,其中自動駕駛是其最火的應用領域。
“然而其本質上是在已知、過去的空間中采樣學習,面對未知、未來的開放空間,并不能很好地認識到其自身的局限性,會把未知劃入到已知范疇加以處理,從而給出錯誤的結果,這給開放道路下完全自動駕駛帶來嚴重的安全隱患。面對科恩實驗室的貼紙等特別設計的對抗樣本,除了將其納入學習樣本,并不能保證面對新的對抗樣本時不出錯誤。”
李鈾認為,只有在人工智能技術取得突破,激光雷達等傳感器技術進一步發展,同時在社會層面,需要交通規劃、道路設計、車聯網、安全標準、法律法規等基礎設施取得長足發展之后,完全自動駕駛才會變得可行。
在此之前,配有自動駕駛系統功能的汽車可以在某些情況、某些路段下實現無人駕駛。但由于邊界不清,還將繼續在人的監控下實現自動駕駛,比如特斯拉要求司機必須將雙手放在方向盤上,隨之帶來因駕駛員走神、無聊等心態變化而產生的新的安全隱患。
目前汽車行業可落地的自動駕駛主要還是自適應巡航、自主緊急剎車、車道線保持、自主泊車、堵車輔助駕駛等L2至L3自動駕駛技術。
現階段,所謂的全自動駕駛系統更多的是汽車廠商的宣傳,車還得我們自己開。可喜的是,L3級別自動駕駛技術正逐步走向成熟。未來,開車將會更輕松。




 奔馳CLC四門Coupe假想圖 或2017年上市
奔馳CLC四門Coupe假想圖 或2017年上市
